Steering system control
Goal
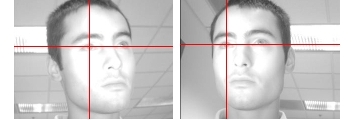
Pupil coordinates (two pairs)
in widefield cameras
Steering angles
for narrowfield camera
End-to-end control / Implicit calibration
Pupil coordinates
Steering angles
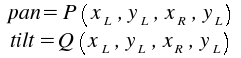
where P and Q are polynomial functions of a
chosen
degree.
Least Square Error minimization: